핵심 내용
지금은 2004년 11월, 사막 한가운데다
2004년 DARPA 그랜드 챌린지에서 자율주행차가 수 km를 겨우 기어가던 장면을 기억할 필요가 있습니다. 20년 뒤 웨이모는 샌프란시스코를 누비고 있습니다. Humanoid Summit 2026이 열린 마운틴뷰 컴퓨터 역사 박물관에는 당시 웨이모의 초기 훈련용 포드가 전시되어 있었고, 그 옆에서 10개 세션의 발표자들은 "지금이 바로 그 순간"이라는 메시지를 반복했습니다(4-1). 비전 처리는 "사실상 해결된 문제"가 되었고, Google DeepMind의 Carolina Parada는 Gemini Robotics라는 Vision-Action 모델로 픽셀에서 로봇 동작까지 엔드투엔드로 처리하는 시스템을 시연했습니다(4-1). 데이터 부족이 여전히 최대 병목이라는 점은 거의 모든 발표자가 인정했고(4-2), A3 회장 Jeff Burnstein은 "휴머노이드는 현재 사람 주변에서 작업하기에 충분히 안전하지 않다"고 단언하며 안전 표준의 시급성을 강조했습니다(4-3). 일본이 국가 전략으로 로봇 산업을 키워 세계 선두에 섰고, 지금은 중국이 50개 이상의 휴머노이드 기업을 전시하며 동일한 전략을 더 큰 규모로 실행하고 있다는 사실은(4-4), 이 산업이 더 이상 기술 시연의 영역이 아니라 국가 경쟁력의 영역으로 진입했음을 보여줍니다.
진짜 병목은 눈이 아니라 손끝에 있다
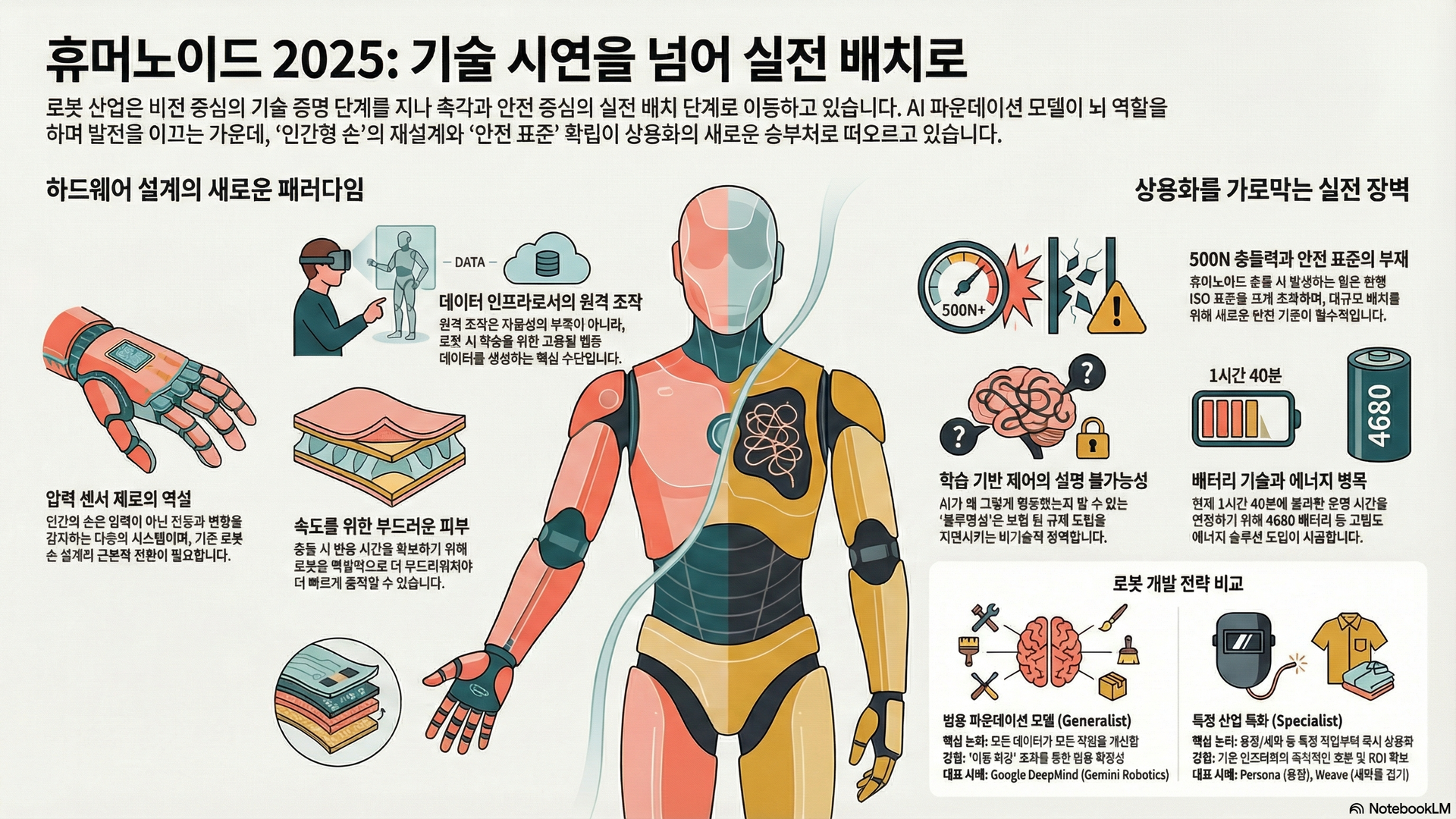
표면 위의 낙관 아래에는 다른 풍경이 있습니다. Northwestern대학의 Ed Colgate 교수가 무대 위에서 작은 장난감을 손안에서 자유자재로 돌려보인 순간, 청중은 인간 손의 정교함이 현재 로봇과 "극적으로 다르다"는 현실을 목격했습니다. 프라운호퍼 IPA의 Werner Kraus는 이동 중인 휴머노이드의 충돌 시 최대 500뉴턴의 힘이 발생하며 현행 ISO 협동로봇 표준을 크게 초과한다는 측정 데이터를 공개했습니다(2-1). 이 숫자는 휴머노이드가 산업용 로봇처럼 안전 울타리 뒤에 격리될 수 없는 환경에서 작동해야 한다는 근본적 도전을 수치로 입증합니다. 에너지 소비 측면에서도 Unit G1의 280와트 소비량은 현재 배터리로 1시간 40분마다 교체가 필요한 제약을 보여줍니다(2-3). 그러나 가장 근본적인 발견은 Colgate와 Sanctuary AI의 Jeremy Fishel이 독립적으로 지적한 한 가지 사실입니다 — "우리 손에는 압력 센서가 하나도 없다"(1-1). 대부분의 로봇공학자가 로봇 손에 압력 센서를 장착하지만, 인간 손은 변형·진동·텍스처·온도를 감지하는 다층적 기계수용체로 작동합니다. 이는 수십 년간 로봇 손 설계의 출발점 자체가 잘못되어 있었을 가능성을 시사합니다.
이 인식 전환은 세 가지 방향으로 확장됩니다. 첫째, 촉각은 작업을 "가능하게" 하는 것이 아니라 "빠르게" 만드는 감각입니다(3-2). Roland Johansson의 1980년대 실험에서 피부 감각이 마비된 피험자도 결국 성냥에 불을 붙였지만, 시간이 극도로 오래 걸렸습니다. Fishel은 자연이 대형 동물에게 부드러운 피부를 부여한 이유가 충돌 시 반응 시간을 확보하여 더 빠르게 움직일 수 있게 하기 위함이라는 진화적 논리를 제시합니다(3-2). 이는 로봇의 속도를 높이려면 역설적으로 더 부드러워져야 한다는 결론으로 이어집니다. 둘째, 원격 조작(teleoperation)은 소셜 미디어에서 "자율성을 위장하는 속임수"로 비판받지만, HMX의 Joe Michaels와 Fishel은 이것이 AI 훈련 데이터 생성의 핵심 인프라이자, 코너 케이스 대응을 위한 필수 안전망임을 설득력 있게 입증했습니다(1-2). Fishel이 제시한 인간형 손의 진정한 가치 — 50개 이상의 자유도를 가진 인간 손을 사람이 직관적으로 제어할 수 있다는 사실 — 는 텔레오퍼레이션이 단순한 과도기 기술이 아니라 로봇 학습의 구조적 기반임을 보여줍니다(1-2). 셋째, Generalist의 Pete Florence가 공개한 Gen Zero 모델은 "모든 데이터가 모든 작업을 개선한다"는 확장성을 입증하며, 특정 작업과 무관한 범용 데이터를 확장하면 추적 중인 모든 개별 작업 성능이 동시에 향상되는 이중 하강(double descent) 효과를 관찰했습니다(1-3). 이는 로봇 파운데이션 모델이 이론에서 현실로 전환되었음을 보여주는 이정표입니다.
세탁소에서 용접 현장까지, 그리고 빈 가격표
10개 세션을 교차하면 가장 선명하게 드러나는 패턴은 범용 vs 특화의 전략적 긴장입니다. Pete Florence는 "좁은 모델에 베팅하는 것은 장기적으로 올바른 전략이 아니다"라고 단언하는 반면(1-3), Persona의 Nic Radford는 "초기부터 강박적으로 상업적 초점에 집중하기로 결정했다"며 용접이라는 특정 작업부터 시작하는 전략을 선택했습니다(1-4). Weave Robotics의 Evan Wineland은 세탁물 접기라는 "가장 평범한 문제"로 설립 1년 만에 상용 배치를 달성했습니다(2-4). 이 발산은 모순이 아닙니다. 범용 파운데이션 모델이 장기적 승자가 될 것이라는 점에는 모든 발표자가 수렴하지만, 그 여정의 시작점은 특화된 산업 현장이라는 역설이 작동하고 있습니다(1-4). Radford가 지적한 대로, 휴머노이드의 인간 형태는 인간을 모방하기 위함이 아니라 "문의 충돌 방지 바가 80번째 백분위수 인간의 조작 높이에 최적화되어 있는" 기존 인프라와의 호환성을 위한 기능적 필연입니다(1-4).
그러나 10개 세션이 침묵한 영역이 오히려 더 중요한 신호를 보냅니다. 첫째, 로봇 도입의 구체적 비용 대비 효과(ROI) 분석이 거의 부재했습니다. Weave의 세탁 서비스나 Persona의 용접 작업이 언급되었지만, 단위 경제학(unit economics)은 공개되지 않았습니다. 둘째, 중국이 로봇 산업에서 "모든 국가를 압도"한다는 진단이 반복되었으나, 중국 기업의 직접 발표는 단 하나도 없었습니다. Fraunhofer IPA가 G1 로봇의 중국 실시간 신호 전송 문제를 공개한 것은(2-2), 기술 주권과 데이터 보안이 표준화 논의의 새로운 축으로 부상하고 있음을 시사합니다. 셋째, 로봇 간 협업(multi-robot coordination), 환경 지속가능성, 로봇 도입이 노동 시장에 미칠 영향, 한국 로봇 산업의 글로벌 포지셔닝, 가정용 로봇의 구체적 로드맵은 논의되지 않았습니다. 이러한 침묵은 현재 휴머노이드 산업이 "가능성의 증명" 단계에 집중하고 있으며, 대규모 배치의 경제적·사회적 복잡성은 다음 사이클의 의제로 밀려나고 있음을 보여줍니다.
학습 기반 로봇 제어의 부상은 또 다른 구조적 과제를 만들고 있습니다. Radford는 "정책을 학습시켜 로봇에 배포하면 로봇이 어떤 행동을 하는데, 왜 그렇게 했는지 우리도 모른다"고 솔직하게 인정했습니다(3-3). 전통적 프로그래밍에서는 코드를 추적해 문제를 찾을 수 있었지만, 학습 기반 시스템에서는 불가능합니다. 이 "설명불가능성"은 보험·규제·윤리라는 비기술적 장벽과 결합되어, 기술적 성숙도와 사회적 수용 사이의 간극을 만들고 있습니다(3-3). Google DeepMind의 Constitutional AI — 로봇에게 맥락 기반 규칙을 부여하는 시스템 — 는 이 간극을 메우려는 시도이지만, 아직 연구 단계입니다. Joe Michaels의 표현대로, "우리는 마라톤의 첫 걸음을 내딛고 있는 단계"입니다.
인사이트 맵
| 공통된 시각 | 새로운 시각 | |
|---|---|---|
| 간과하는 내용 |
Q2. Hidden Evidence | Q1. Blind Spot |
| 주목하는 내용 |
Q3. Common Ground | Q4. Reframing |
Take Away
AI·비전·컴퓨팅 세 가지 기술이 동시에 임계점에 도달하면서, 휴머노이드 로봇 산업은 "기술 시연"에서 "상용 배치"로 전환되고 있습니다. 그러나 진짜 경쟁 우위는 AI 모델이 아니라 촉각·피부·안전이라는 물리적 인터페이스에서 결정될 가능성이 높습니다. 3~5년 뒤 이 시점을 돌아볼 때, 가장 중요했던 변화는 파운데이션 모델의 성능 향상이 아니라, "압력 센서가 0개인 인간 손"이라는 발견이 촉발한 로봇 하드웨어 설계의 패러다임 전환이었을 수 있습니다. 지금 논의되지 않고 있는 영역 — 로봇 도입의 단위 경제학, 중국 기업의 실질적 기술 수준, 학습 기반 제어의 설명가능성 — 이 다음 사이클의 핵심 의제로 부상할 가능성이 높습니다. 규칙이 바뀌고 있는 곳은 실험실이 아니라 세탁소와 용접 현장입니다.
경영시사점
중국이 국가 전략으로 산업용 로봇 시장을 압도하고 있으며, 2024년 베이징 세계 로봇 컨퍼런스에 50개 이상의 휴머노이드 기업이 전시할 정도로 성장이 가속되고 있습니다(4-4). 휴머노이드 로봇의 500N 충돌력은 현행 ISO 협동로봇 표준을 크게 초과하며(2-1), 안전 표준이 확립되기 전까지 대규모 상용화는 구조적으로 제한됩니다(4-3). G1 로봇의 중국 실시간 신호 전송 사례(2-2)는 로봇 사이버 보안이 새로운 규제 장벽으로 부상할 것임을 시사합니다. 학습 기반 제어의 설명불가능성(3-3)은 보험·규제·윤리 프레임워크가 기술을 따라잡지 못하는 구조적 간극을 만들고 있으며, 이 간극이 상용화 일정을 지연시킬 수 있습니다.
AI 파운데이션 모델이 로봇 형태(form factor)에 무관하게 적용 가능한 embodiment-agnostic AI로 진화하면서(4-1), 단일 모델로 다양한 로봇을 제어하는 범용 플랫폼 시대가 열리고 있습니다. 촉각 센서·소프트 스킨·유압식 손 등 로봇 하드웨어의 근본적 재설계가 진행 중이며(1-1)(3-1), 비전이 범용화된 지금 이 영역에서의 기술 우위가 향후 가치사슬의 핵심 병목을 지배할 수 있습니다. 원격 조작이 AI 훈련 데이터의 핵심 인프라로 재평가되면서(1-2), 텔레오퍼레이션 기술과 데이터 파이프라인이 새로운 경쟁 우위의 원천으로 부상하고 있습니다. Weave Robotics의 세탁 서비스와 Persona의 용접 작업이 보여주듯, 특화된 초기 시장 선택이 빠른 상용화의 열쇠이며(2-4)(1-4), 이 경험 데이터가 범용 AI 모델의 학습 자원이 됩니다. 의료·교육·환대 서비스 등 비제조 분야 역시 휴머노이드의 차세대 시장으로 부상하고 있습니다(3-4).
① 촉각·피부 기술 선점 — 로봇 손의 설계 패러다임이 "압력 센서"에서 "다층적 기계수용체"로 전환되고 있으며(1-1), 비전이 범용화된 지금 촉각이 차세대 가치사슬의 핵심 병목으로 부상하고 있습니다(3-1). HAND ERC가 5개 대학·200명 교수진의 10년 프로젝트로 추진하는 규모는 이 영역의 전략적 무게를 보여줍니다. 소프트 로보틱스·전신 촉각 센싱·하이브리드 소재에 선제적으로 투자를 검토할 필요가 있습니다. 이 기술이 표준화되면 후발 진입 비용은 기하급수적으로 증가합니다.
② 안전 표준 선제 참여 — A3가 미국 휴머노이드 안전 표준을 개발 중이고, Fraunhofer IPA가 ISO 워킹 그룹을 주도하며, Boston Dynamics·Pal Robotics가 직접 참여하고 있습니다(4-3). 500N 충돌력(2-1)부터 학습 기반 제어의 설명가능성(3-3)까지, 표준의 범위가 하드웨어에서 AI까지 확장되고 있으며, 표준 설정 프로세스에 참여하지 않는 기업은 타사가 설계한 규칙을 수용해야 합니다. 이 창은 ISO 워킹 그룹이 초안을 확정하는 시점에 급속히 좁아집니다.
③ 로봇 AI 데이터 인프라 확보 — 로봇 행동 데이터가 최대 병목인 상황에서(4-2), Gen Zero 모델이 입증한 "모든 데이터가 모든 작업을 개선하는" 확장성(1-3)은 데이터 수집 역량이 곧 AI 역량임을 확인시켜 줍니다. 텔레오퍼레이션 기반 실세계 데이터 수집 인프라를 자체 구축할 것인가, Gemini Robotics Trusted Tester Program(4-1) 등 글로벌 플랫폼 파트너십으로 확보할 것인가. 범용 AI 플랫폼 생태계가 고착화되기 전에 이 결정의 시간 가치는 급속히 높아지고 있습니다.
본 브리프는 컨퍼런스 원문 자료(Whisper/Plex/Elasticsearch), AI(claude-opus-4-6)를 SW로 연결 후 특화 프롬프트에 따라 AI가 자동생성한 리포트(28.8분)입니다. (분석 프로세스 ① 전수 스캔 → ② 전략 축 심층 독해 → ③ 교차분석 + Silence Analysis → ④ 인사이트 맵 + Silence Map 배치 → ⑤ 초안 작성 → ⑥ Claude Review Agent가 3회 Revision) (데이터 소스: humanoidsummit2026 library, 2026-02-20.)
즉각적인 논의가 필요한 토픽
낮은 독점성 + 주류와 일치 · 주요 보도와 일치하되 현장 데이터로 깊이를 더한 인사이트
AI 파운데이션 모델 → 로봇 상용화의 핵심 촉매
Google DeepMind의 Gemini Robotics는 Vision-Action 모델(VAM)로서 픽셀 입력에서 로봇 동작까지 엔드투엔드로 처리하는 통합 시스템입니다. 전통적 로봇공학의 분리된 시스템(인식-계획-제어)과 달리, 단일 기초 모델로 휠 기반 로봇부터 이족보행 휴머노이드까지 제어하는 embodiment-agnostic AI를 구현했습니다. 이 접근의 기원은 Google에서 PaLM-E를 개발할 때 "언어모델 자체를 로봇의 두뇌로 만드는" 아이디어였으며, 당시에는 혁신적이었으나 현재는 업계 표준이 되었습니다. Gemini의 다국어 지원 능력이 자연스럽게 로봇에 계승되어, 일본어를 비롯한 다양한 언어로 명령을 이해하고 실행할 수 있다는 점은 범용 모델의 예상치 못한 이점입니다.
로봇 행동 데이터 부족 → 최대 병목
LLM이 인터넷의 방대한 텍스트 데이터로 학습할 수 있는 것과 달리, 로봇의 물리적 행동 데이터는 현저히 부족합니다. 이 문제는 거의 모든 세션에서 반복적으로 지적되었습니다. 현재의 주된 해결책은 텔레오퍼레이션 데이터이며, 시뮬레이션·월드 모델·비디오 학습 등 대안적 데이터 소스는 아직 연구 단계입니다. HMX의 Joe Michaels는 스웨덴 실험을 인용하며 — 손에 마취제를 주입한 피험자가 성냥을 집어 불을 붙이는 단순한 작업조차 수행하지 못했다 — 촉각 데이터의 부재가 로봇 성능을 얼마나 저하시키는지를 보여주었습니다. 135개 피드백 포인트의 햅틱 글러브가 이 문제를 해결하려는 시도이며, 데이터 수집 역량이 AI 역량과 직결되는 구도가 형성되고 있습니다.
안전 표준·규제·보험 → 상용화의 전제조건
프라운호퍼 IPA의 30~40가지 청정도 테스트 프로토콜, A3의 1986년 이래 안전 표준 개발 경험, 그리고 Boston Dynamics·Pal Robotics와의 ISO 워킹 그룹 협력은 로봇 안전 표준이 다층적·다영역적으로 진행되고 있음을 보여줍니다. 특히 청정실 환경에서의 로봇 운영은 반도체·제약·태양광 산업에서 핵심 과제로, ISO 5 수준의 청정도 달성을 위해 로봇의 외부 코팅·모서리 설계·내부 공간을 완전히 재설계해야 합니다. 이는 휴머노이드가 산업별로 완전히 다른 스펙의 제품으로 개발되어야 함을 의미합니다. Jeff Burnstein은 "가정에서 로봇이 수집하는 데이터의 프라이버시 보호가 필수적"이라며, AI 모델의 데이터 소유권 분쟁까지 표준화 범위가 확대되고 있음을 지적했습니다.
국가 로봇 전략 → 산업 경쟁력의 결정 요인
1961년 GM 공장의 첫 산업용 로봇 도입부터 60년간의 역사는 국가 전략의 결정적 역할을 보여줍니다. 일본은 고령화 문제와 품질 개선을 위해 국가 전략으로 로봇을 육성하여 세계 선두에 섰고, 중국은 현재 동일한 전략을 더 큰 규모로 실행하며 모든 국가를 압도하고 있습니다. 2024년 베이징 세계 로봇 컨퍼런스에는 50개 이상의 휴머노이드 기업이 전시했습니다. 반면 미국은 2010~2019년 역사상 최대 도입기를 경험했지만 체계적인 국가 전략이 부재합니다. A3의 Burnstein 회장은 미국이 8~10개국이 보유한 국가 로봇 전략을 수립해야 한다고 워싱턴 DC에서 로비 중이며, AI 선도국 지위를 로봇 산업으로 확장하지 못하면 경쟁에서 뒤처질 수 있다고 경고합니다.
실행에서 주목할 토픽
높은 독점성 + 주류와 일치 · 알려진 사실이지만 현장 데이터가 부여하는 독점적 무게감
500N 충돌력 → ISO 표준 초과, 새 안전 기준 필수
프라운호퍼 IPA의 Werner Kraus가 공개한 측정 데이터는 휴머노이드 안전의 현실을 수치로 입증합니다. 이동 중인 휴머노이드 로봇의 충돌 시 최대 500뉴턴의 힘이 발생하며, 이는 현행 ISO 협동로봇 표준을 크게 초과합니다. 로봇 설계에 포함된 30개의 기어와 관절로 인한 손가락 끼임 위험, 불규칙한 지형에서의 안정성 문제도 확인되었습니다. 이 수치는 휴머노이드가 산업용 로봇처럼 안전 울타리 뒤에 격리될 수 없는 환경에서 작동해야 한다는 점에서, 로봇 제조업체가 설계 변경을 통해 충돌 에너지를 감소시키거나 거리 유지 센서를 도입해야 함을 의미합니다. 안전 표준이 확립되기 전까지 대규모 상용화는 구조적으로 제한됩니다.
G1 로봇의 중국 실시간 신호 전송 → 사이버 보안 문제
프라운호퍼 IPA가 공개한 발견은 기술적 결함을 넘어 지정학적 긴장으로 확대됩니다. Unit G1 로봇을 인터넷에 연결할 경우 중국으로 실시간 신호를 전송하는 것이 확인되었으며, 이는 데이터 주권과 사이버 보안 문제를 직접 제기합니다. 로봇이 가정이나 공장에서 수집하는 데이터 — 공간 정보, 작업 패턴, 개인 행동 — 의 관리와 보호가 새로운 규제 영역으로 부상하고 있습니다. 향후 로봇 표준화 협의에서 데이터 전송 경로, 암호화 프로토콜, 접근 제어 메커니즘에 대한 국제 합의가 필수적이며, 이는 상용화 과정에서 상당한 지연을 초래할 수 있습니다.
280W 에너지 소비 → 1시간 40분 배터리 한계
프라운호퍼 IPA가 측정한 Unit G1의 에너지 소비량 280와트는 현재 배터리 기술로 1시간 40분마다 교체가 필요한 제약을 보여줍니다. 이는 생산 현장에서의 경제성과 작업 연속성에 직접적 영향을 미칩니다. 그러나 최근 고밀도 배터리 기술 발전으로 4시간, 나아가 전체 근무 시간인 8시간 연속 운영이 가능해질 것으로 예상됩니다. 이 기술은 전기자동차 산업의 혁신으로부터 직접적인 혜택을 받고 있으며, 배터리 교체 주기는 로봇 상용화의 게이트 역할을 합니다. 에너지 효율성 표준화는 로봇 제조업체의 설계 목표이자 최종 사용자의 운영 비용 예측 기준이 됩니다.
Weave Robotics: 설립 1년 → 상용 배치 달성
Weave Robotics는 2024년 설립 후 같은 해 9월 첫 상용 배치를 달성하며 전례 없는 속도로 시장에 진입했습니다. Apple 출신 공동 창업자들은 OS부터 모터 드라이버까지 모든 소프트웨어를 자체 개발하는 수직 통합 전략으로 비용을 극적으로 낮추고 개발 속도를 가속했습니다. 현재 샌프란시스코 전역 여러 세탁소에서 Tumble Laundry와 파트너십으로 최대 40파운드의 세탁물을 자동으로 접는 서비스를 유료 운영 중입니다. 비전 언어 행동 모델(VLA) 기반 자율 제어 시스템은 소비자 제품 수준의 정밀도와 안전성을 확보했으며, 호텔 산업과 제조업체로 확장을 논의 중입니다. 이 사례는 프로토타입 단계에 머물러 있는 많은 경쟁사와 차별화되며, "빠른 배치 → 실전 학습 → 개선"의 순환 구조가 경쟁 우위의 원천임을 보여줍니다.
의미를 잘 생각해 볼 필요가 있는 토픽
낮은 독점성 + 주류와 다른 시각 · 알려진 사실을 다른 프레임으로 재해석
"해결된" 비전 vs "미해결" 촉각 → 가치사슬 역전
Persona의 Nic Radford가 "비전은 사실상 해결된 문제"라고 선언한 것은 로봇 가치사슬의 핵심 병목이 이동하고 있음을 의미합니다. AI·비전·컴퓨팅이 범용화되면서 이들은 더 이상 차별화 요인이 아닙니다. 반면 촉각 센서, 소프트 스킨, 정교한 손은 여전히 미해결이며, 이 영역의 기술 우위가 향후 가치사슬의 핵심 병목을 지배하게 됩니다. Colgate의 HAND ERC 프로젝트가 5개 대학, 200명의 교수진, 100명의 박사과정 학생이 참여하는 대규모 국가 프로그램인 이유가 여기에 있습니다. 10년 후 사용할 수 있는 하드웨어를 목표로 하는 이 프로젝트는 촉각·피부·손이 로봇의 다음 프론티어임을 국가 연구 투자 규모로 확인시켜 줍니다.
부드러운 피부의 진화적 필연 → 속도 = 안전의 역설
Sanctuary AI의 Jeremy Fishel이 제시한 진화적 논리는 로봇 설계에 대한 근본적 재고를 요구합니다. 곤충을 사람 크기로 확대하면 질량은 길이의 세제곱으로, 강도는 길이의 제곱으로 증가하여, 거대한 곤충이 충돌에서 살아남으려면 극도로 느리게 움직여야 합니다. 자연이 대형 동물에게 부드러운 피부를 부여한 이유는 충돌 시 반응 시간을 확보하여 더 빠르게 움직일 수 있게 하기 위함입니다. 이 논리를 로봇에 적용하면, 속도를 높이려면 역설적으로 더 부드러워져야 합니다. 강체 간 충돌은 힘이 급격히 증가하여 로봇의 유일한 대응책이 속도 감속이지만, 유연한 외피가 있으면 충돌 시 반응 시간을 확보할 수 있습니다. 이는 로봇의 안전과 생산성이 상충하지 않고 오히려 동일한 기술 — 소프트 스킨 — 으로 동시에 해결될 수 있음을 시사합니다.
학습 기반 제어의 "설명불가능성" → 새로운 규제 패러다임
로봇 제어가 상태 머신 기반 프로그래밍에서 학습 기반 정책 배포로 전환되면서, 로봇의 행동에 대한 설명가능성(explainability)이 새로운 도전으로 부상합니다. Radford는 "정책을 학습시켜 로봇에 배포하면 로봇이 어떤 행동을 하는데, 왜 그렇게 했는지 우리도 모른다"고 솔직하게 인정했습니다. 이는 보험·규제 프레임워크에 직접적 영향을 미칩니다. 미국에서 평균 1억 마일당 1건의 사망사고가 발생하지만, 기계의 결정으로 인한 사고에 대한 보험과 규제의 대응 방식은 여전히 미정입니다. 용접 토치를 든 휴머노이드의 작업장 안전과 책임 소재에 대한 기준이 필요하지만, 현재 보험업계는 이를 어떻게 다룰지 결정하지 못한 상태입니다. 이 간극은 기술적 성숙도와 상용화 사이의 시차를 만들어냅니다.
소셜 로봇 = 도구 아닌 정서적 파트너 → 시장 확장
Mind Children의 Cody는 대부분의 휴머노이드가 산업 현장의 실용적 작업에 집중하는 것과 달리, 교육·헬스케어·환대 서비스 등 정서적 교감이 핵심인 분야를 타깃으로 합니다. 3피트 크기의 Cody는 언캐니 밸리를 회피하기 위해 회색 피부와 디스플레이 눈을 채택했으며, 9개의 서보 모터로 실리콘 피부를 움직여 다양한 감정 표현을 구현합니다. 가장 혁신적인 개념은 "역방향 학습" — 학생이 로봇에게 배운 것을 가르치면서 지식을 내재화하는 방식 — 입니다. Mind Children은 한국 파트너와의 협력을 통해 2026년 후반 한국 교육 시장을 첫 번째 타깃으로 설정하고 있으며, 이는 로봇이 노동력 대체가 아닌 인간 능력 강화의 도구로 자리잡는 새로운 시장 카테고리를 개척합니다. ### Silence Map *10건 전수 확인으로 식별한 구조적 부재 — 논의되지 않은 것이 현재 담론의 한계를 규정합니다* | Gap | 기대 의제 | 실제 | 전략적 의미 | |-----|----------|------|------------| | 🔴 | 로봇 도입 ROI·단위 경제학 | 가격·비용 구조 미공개 | 투자자와 도입 기업이 경제성 판단 불가. 상용화 확산의 핵심 정보 공백 | | 🔴 | 중국 휴머노이드 기업의 기술 수준 | 중국의 규모만 언급, 직접 발표 부재 | 최대 경쟁자의 실체가 불투명. 과대·과소 평가 모두 가능 | | 🔴 | 로봇 간 협업(Multi-Robot) | 단일 로봇 중심 논의에 국한 | 공장·물류 센터의 대규모 배치 시 필수 기술. 다음 사이클 핵심 의제 | | 🔴 | 환경 지속가능성 | 전혀 논의되지 않음 | 로봇 제조·운영의 탄소발자국, 재활용 설계 등 ESG 요구 증가 | | ⚠️ | 가정용 로봇 로드맵 | 가능성 언급만, 구체적 일정 부재 | 가장 큰 잠재 시장이나 안전·비용·서비스 과제가 산적 | | ⚠️ | 노동 시장 영향·일자리 전환 | 문화적 수용성 차원에서만 논의 | 노조·정책 입안자의 핵심 관심사이나 기술 중심 담론에서 배제 | | ⚠️ | 한국 로봇 산업의 포지셔닝 | Mind Children 한국 파트너십만 언급 | 한국의 제조·반도체·배터리 역량이 로봇 생태계에서 어디에 위치하는지 미정의 |
선견/선수를 위한 토픽
높은 독점성 + 주류와 다른 시각 · 10개 세션 교차분석으로만 발견 가능한 인사이트
"압력 센서 = 0" → 로봇 손 설계의 근본적 오류
로봇 손 개발의 역사는 40~50년에 이르지만, 대다수 연구자가 로봇 손에 압력 센서를 장착해왔습니다. 그러나 Northwestern대학의 Ed Colgate 교수와 Sanctuary AI의 Jeremy Fishel이 독립적으로 지적한 바에 따르면, 인간 손에는 압력 센서가 단 하나도 없습니다. 인간 피부의 기계수용체(Merkel 세포, Meissner 소체, Pacinian 소체, Ruffini 말단)는 변형·진동·텍스처·온도를 감지하는 다층적 시스템으로, 단순한 압력 측정과는 본질적으로 다릅니다. 많은 연구자가 시도하는 "촉각 픽셀(taxels)" 접근도 Fishel에 의해 잘못된 방향으로 비판받았으며, 촉각의 시간적 동적 측면이 공간적 고해상도보다 훨씬 중요하고 커버리지가 해상도보다 우선한다는 점이 강조되었습니다. 이 발견은 수십 년간의 로봇 손 설계가 잘못된 전제 위에 세워져 있었을 가능성을 제기하며, 한국 로봇 부품 기업에게는 다층적 촉각 센서라는 새로운 시장 기회를 의미합니다.
원격 조작 비판 → AI 훈련 데이터의 핵심 인프라
소셜 미디어에서 원격 조작(teleoperation)은 "자율성을 위장하는 속임수"로 비판받지만, 10개 세션의 교차분석은 정반대의 결론을 보여줍니다. 인터넷에는 텍스트와 이미지 데이터가 풍부하지만, 로봇의 물리적 행동 데이터는 현저히 부족하며, 이 데이터 병목을 해결하는 가장 확실한 방법이 텔레오퍼레이션입니다. HMX의 135개 피드백 포인트 햅틱 글러브는 로봇 손의 촉각을 실시간으로 인간에게 전달하고, 인간의 조작을 로봇 학습 데이터로 변환하는 폐쇄 루프 시스템입니다. Fishel이 지적한 대로, 인간 손과 팔의 50개 이상 자유도를 직관적으로 제어할 수 있는 능력은 수십만 년의 진화 결과이며, 이를 AI에 전달하려면 인간형 인터페이스가 필수입니다. 더 나아가 "임시 원격 조작" — Waymo가 막다른 길에서 인간이 일시적으로 개입하는 방식 — 은 완전 자율화 이전의 필수 안전망으로 기능합니다. 원격 조작은 과도기 기술이 아니라 로봇 학습의 구조적 기반입니다.
범용 데이터 확장 → 모든 개별 작업 성능 동시 향상 (이중 하강)
Generalist의 Gen Zero 모델은 로봇 파운데이션 모델의 실현 가능성을 처음으로 실증적으로 입증한 이정표입니다. 핵심 발견은 특정 작업과 완전히 분리된 범용 물리적 상호작용 데이터를 확장하면, 추적 중인 모든 개별 작업 성능이 동시에 향상된다는 사실입니다. 전통적 머신러닝에서는 과적합 시 모델 축소가 해법이었으나, 충분한 데이터가 있을 때는 오히려 모델을 크게 키우는 것이 과적합을 피하는 더 효과적인 방법이라는 "이중 하강(double descent)" 효과가 로봇 공학에서 관찰되었습니다. 이 효과를 관찰할 수 있는 충분한 데이터 체제에 도달하는 것 자체가 1년 이상의 반복 작업을 필요로 했습니다. 이는 LLM에서의 스케일링 법칙이 로봇 공학에서도 작동함을 보여주는 첫 번째 증거이며, 데이터 수집 역량이 곧 AI 역량이 되는 구도를 확인시켜 줍니다.
휴머노이드 형태 = 인간 모방이 아닌 인프라 호환의 필연
휴머노이드가 인간 형태를 취하는 이유는 인간을 닮으려는 것이 아니라, 인간을 위해 설계된 세상에서 작동해야 하기 때문입니다. Persona의 Nic Radford는 "문의 충돌 방지 바가 80번째 백분위수 인간의 조작 높이에 최적화되어 있다"는 구체적 예시로 이를 설명했습니다. 계단, 문손잡이, 작업대, 제어 패널 등 기존 환경의 모든 요소가 인간의 인체측정학적 특성을 기준으로 설계되어 있으므로, 이 인프라를 활용하려면 두 개의 매니퓰레이터(팔), 비전 플랫폼(머리), 이족보행 프레임워크(다리)를 갖춘 형태로 수렴합니다. 동시에 범용 vs 특화의 전략적 긴장이 존재합니다. Radford는 용접이라는 특정 작업부터 시작하여 연삭·도장·조립로 확장하는 단계적 전략을, Florence는 모든 데이터가 모든 작업을 개선하는 범용 접근을 주장합니다. 이 발산은 "범용 모델이 장기적 승자"라는 수렴 위에서 "시작점은 특화"라는 역설로 공존합니다.
Silence Map
10건 전수 확인으로 식별한 구조적 부재 — 논의되지 않은 것이 현재 담론의 한계를 규정합니다
References
| No. | 세션명 | Library | Date |
|---|---|---|---|
| [1] | Advancing Human Dexterity & Robotics — Ed Colgate | humanoidsummit2026 | 2026-01-05 |
| [2] | Building Practical, Capable Humanoids — Evan Wineland | humanoidsummit2026 | 2026-01-05 |
| [3] | Defining Robotics Standards for a Human World — Werner Kraus | humanoidsummit2026 | 2026-01-05 |
| [4] | Designing the Human-Machine Experience — Joe Michaels | humanoidsummit2026 | 2026-01-05 |
| [5] | From Computer Vision to Robotics — Carolina Parada | humanoidsummit2026 | 2026-01-05 |
| [6] | Inside the Future of Social Humanoids — Chris Kudla | humanoidsummit2026 | 2026-01-05 |
| [7] | Lessons from the Industrial Robot Revolution — Jeff Burnstein | humanoidsummit2026 | 2026-01-05 |
| [8] | The Future of Robotics — Nic Radford | humanoidsummit2026 | 2026-01-05 |
| [9] | The Rise of Generalist Humanoids — Pete Florence | humanoidsummit2026 | 2026-01-05 |
| [10] | Why Hands are the Hardest Problem — Jeremy Fishel | humanoidsummit2026 | 2026-01-05 |